Презентация - Основные принципы управления (регулирования) в автоматизации
просмотров
Текст этой презентации
Слайд 1
Промышленные системы управления и регулирования
Основные принципы управления (регулирования)
Краткий курс лекций
Слайд 2
Основные понятия
Регулирование - воздействия на объект управления, посредством которых достигается состояние устойчивости этого объекта в случае возникновения отклонения от заданных параметров.
Управление – процесс, обеспечивающий необходимое протекание технологического процесса (преобразование энергии, вещества и информации, поддержание работоспособности и безаварийности функционирования) путем сбора и обработки информации о состоянии объекта и внешней среды, выработке решений о воздействии на объект и их исполнение
В технике совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта без непосредственного участия человека в соответствии с заданной целью управления называется автоматическим управлением.
Совокупность взаимодействующих управляющих устройств и управляемого объекта образуют систему автоматического управления (САУ). САУ поддерживает или улучшает функционирование управляемого объекта .
Слайд 3
Принцип оптимального управления
В соответствии с этим принципом управление может быть наилучшим.
Можно выделить два типа задач оптимального управления:
Оптимизация конечного состояния объекта управления, при этом исследуется и оптимизируется конечное состояние объекта. Каким путем объект пришел в это состояние – не учитывается. Задачи этого типа получили распространение в системах организационного и социально-экономического управления
Оптимизация переходного процесса или динамики состояния объекта управления. Рассматривается траектория переходного процесса, а конечный результат не представляет интереса. Такие задачи наиболее применимы при управлении технологическими процессами.
Слайд 4
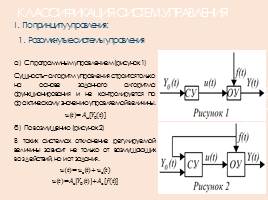
Классификация систем управления
а) С программным управлением (рисунок 1)
Сущность – алгоритм управления строится только на основе заданного алгоритма функционирования и не контролируется по фактическому значению управляемой величины.
???? ???? = ???? ???? [ ???? 0 (????)]
б) По возмущению (рисунок 2) В таких системах отклонение регулируемой величины зависит не только от возмущающих воздействий, но и от задания.
???? ???? = ???? з ???? + ???? в (????)
???? ???? = ???? з ???? 0 ???? + ???? в [????(????)]
I. По принципу управления: 1. Разомкнутые системы управления
Слайд 5
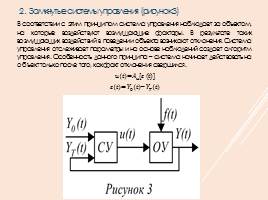
В соответствии с этим принципом система управления наблюдает за объектом, на которые воздействуют возмущающие факторы. В результате таких возмущающих воздействий в поведении объекта возникают отклонения. Система управления отслеживает параметры и на основе наблюдений создает алгоритм управления. Особенность данного принципа – система начинает действовать на объект только после того, как факт отклонения свершился.
???? ???? = ???? ???? [???? (????)]
???? ???? = ???? 0 ???? − ???? ???? ????
2. Замкнутые системы управления (рисунок 3)
Слайд 6
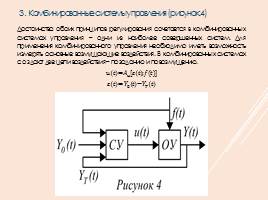
Достоинства обоих принципов регулирования сочетается в комбинированных системах управления – одни из наиболее совершенных систем. Для применения комбинированного управления необходимо иметь возможность измерять основные возмущающие воздействия. В комбинированных системах создают две цепи воздействия – по заданию и по возмущению.
???? ???? = ???? ???? [???? ???? ;????(????)]
???? ???? = ???? 0 ???? − ???? ???? ????
3. Комбинированные системы управления (рисунок 4)
Слайд 7
В зависимости от способа выработки управляющих воздействий, замкнутые АСР делятся на два класса:
Поисковые
Беспоисковые 1. Поисковые АСР
Принцип автоматического поиска применяется для управления объектами, характеристики которых имеют экстремальный характер. Целью управления является отыскание и поддержание управляющих воздействий, соответствующих экстремальному значению управляемой величины.
Обычная АСР не может выполнить задачу оптимизации, т.к. для этого всегда должно быть известно задающее значение управляемого параметра и то, в каком направлении надо менять управляющее воздействие, чтобы привести управляемую величину к заданному значению.
В момент включения поиск начинается с принудительного изменения входной величины в случайном направлении. Если это возмущающее воздействие приведет к увеличению выходного параметра – значит оно сделано в правильном направлении. Его следует продолжить до экстремального значения. Если принудительное изменение входной величины оказалось неправильным, то следует изменить направление воздействия.
II. Классификация по алгоритму управления
Слайд 8
2. Беспоисковые АСР
В зависимости от назначения (характера изменеия задающего воздействия во времени), беспоисковые АСР делятся на три класса: а) Стабилизирующая система – система, алгоритм функционирования которой содержит предписание поддерживать значение управляемой величины постоянным. ???? 0 ???? = ???? ???? ???? =????????????????????
б) Алгоритм функционирования программной АСР содержит предписания изменить управляемую величину в соответствии с заранее заданной функцией. ???? 0 ???? = ???? ???? ???? = ???? п (????)
Следящая АСУ предназначена для изменения управляемой величины в соответствии с изменением другой величины, которая действует на входе системы и законе, который заранее не известен. ???? 0 ???? = ???? ???? ???? = ???? с (????)
В стабилизирующих, программных и следящих системах цель управления заключается в обеспечении равенства или близости управляемой величины ( ???? ???? ???? ) к ее заданному значению
Слайд 9
Промышленные системы управления и регулирования
Основные принципы управления (регулирования)
Лабораторный практикум
Слайд 10
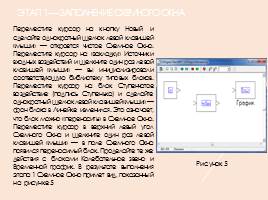
Этап 1 — заполнение Схемного окна
Переместите курсор на кнопку Новый и сделайте однократный щелчок левой клавишей «мыши» — откроется чистое Схемное Окно. Переместите курсор на «закладку» Источники входных воздействий и щелкните один раз левой клавишей «мыши» — вы инициализировали соответствующую библиотеку типовых блоков. Переместите курсор на блок Ступенчатое воздействие (подпись Ступенька) и сделайте однократный щелчок левой клавишей «мыши» — фон блока в Линейке изменился. Это означает, что блок можно «переносить» в Схемное Окно. Переместите курсор в верхний левый угол Схемного Окна и щелкните один раз левой клавишей «мыши» — в поле Схемного Окна появился переносимый блок. Проделайте те же действия с блоками Колебательное звено и Временной график. В результате выполнения этапа 1 Схемное Окно примет вид, показанный на рисунке 5
Рисунок 5
Слайд 11

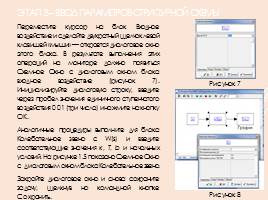
Переместите курсор на выходной порт блока Ступенчатое воздействие, щелкните левой клавишей «мыши» и, отпустив её, «протяните» горизонтальную линию связи к входному порту Колебательного звена, где снова щелкните левой клавишей «мыши» - появится типичная входная стрелка. Если Вы сделали щелчок левой клавишей раньше, чем проводимая связь вошла «в притяжение» входного порта, дотяните линию связи до соответствующего входного порта и щелкните левой клавишей «мыши».
Выполните аналогичные операции с блоком Временной график расположите его на одном уровне с блоками Ступенчатое воздействие и Колебательное звено. Переместите курсор на выход Колебательного звена, щелкните левой клавишей «мыши» и, отпустив клавишу, «протяните» горизонтальную линию к входу блока Временной график, где снова щелкните левой клавишей «мыши». После выполнения этапа 2 Схемное Окно примет вид, показанный на рисунке 6.
Рисунок 6
Этап 2 — проведение линий связи на структурной схеме
Слайд 12
Переместите курсор на блок Входное воздействие и сделайте двукратный щелчок левой клавишей «мыши» — откроется диалоговое окно этого блока. В результате выполнения этих операций на мониторе должно появиться Схемное Окно с диалоговым окном блока входное воздействие (рисунок 7). Инициализируйте диалоговую строку, введите через пробел значения единичного ступенчатого воздействия 0 0 1 (три числа) и нажмите на кнопку ОК. Аналогичные процедуры выполните для блока Колебательное звено с W(s) и введите соответствующие значения к, Т, b и начальных условий. На рисунке 1.5 показано Схемное Окно с диалоговым окном блока Колебательное звено.
Закройте диалоговое окно и снова сохраните задачу, щелкнув но командной кнопке Сохранить.
Рисунок 8
Этап 3 – ввод параметров структурной схемы
Рисунок 7
Слайд 13
Переместите курсор на командную кнопку Параметры расчета и однократно щелкните левой клавишей «мыши» — откроется диалоговое окно, для установки параметров интегрирования. На основе подготовленных исходных данных выберите численный метод интегрирования «Адаптивный 1». Далее введите: точность интегрирования 0.001; максимальный шаг интегрирования 0.1; минимальный шаг интегрирования 0.001; время интегрирования 15; число точек вывода 100.
Закройте диалоговое окно, щелкнув левой клавишей мыши по кнопке ОК. Сохраните задачу (кнопка Сохранить).
Этап 4 – установка параметров интегрирования
Слайд 14
Переместите курсор под блок Входное воздействие и двукратно щелкните левой клавишей «мыши» — появится временное окно для ввода текста. Переместите курсор в это окно, однократно щелкните левой клавишей «мыши» и затем введите заголовок данного блока (в одну—три строки). Переместите курсор на свободное место в Схемном Окне и двукратно щелкните левой клавишей «мыши» — временное окно закроется и под блоком появится желаемая подпись. Если подпись получилась с ошибками, снова откройте временное окно для ввода текста (двукратный щелчок левой клавишей «мыши» по тексту под блоком) и, используя клавиши редактирования, исправьте подпись.
Надпись над блоком W(s) выполняют с помощью блока Заметка из библиотеки Субструктуры.
Интерфейс ПК «МВТУ» позволяет изменить в подписи тип, размер и цвет шрифта
Этап 5 — оформление поясняющих подписей
Слайд 15
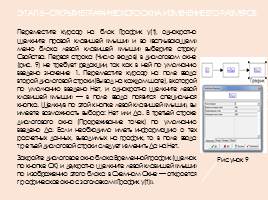
Переместите курсор на блок График у(t), однократно щелкните правой клавишей «мыши» и во «всплывающем» меню блока левой клавишей «мыши» выберите строку Свойства. Первая строка (Число входов) в диалоговом окне (рис. 9) не требует редакции, так как в ней по умолчанию введено значение 1. Переместите курсор на поле ввода второй диалоговой строки (Вывод на каждом шаге), в которой по умолчанию введено Нет, и однократно щелкните левой клавишей «мыши» — в поле ввода появится специальная кнопка. Щелкнув по этой кнопке левой клавишей «мыши», вы имеете возможность выбора: Нет или Да. В третьей строке диалогового окна (Прореживание точек) по умолчанию введено Да. Если необходимо иметь информацию о тех расчетных данных, выводимых на график, то в поле ввода третьей диалоговой строки следует изменить Да на Нет.
Закройте диалоговое окно блока Временной график (щелчок по кнопке ОК) и двукратно щелкните левой клавишей «мыши» по изображению этого блока в Схемном Окне — откроется графическое окно с заголовком «График у(t)».
Этап 6 – открытие графического окна, изменение его размеров
Рисунок 9
Слайд 16
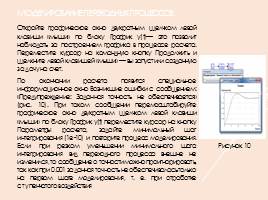
Откройте графическое окно двукратным щелчком левой клавиши «мыши» по блоку График у(t)— это позволит наблюдать за построением графика в процессе расчета. Переместите курсор на командную кнопку Продолжить и щелкните левой клавишей «мыши» — вы запустили созданную задачу на счет.
По окончании расчета появится специальное информационное окно Возникшие ошибки с сообщением: «Предупреждение: Заданная точность не обеспечивается» (рис. 10). При таком сообщении перемасштабируйте графическое окно двукратным щелчком левой клавиши «мыши» по блоку График у(t) переместите курсор на кнопку Параметры расчета, задайте минимальный шаг интегрирования (1е-10) и повторите процесс моделирования. Если при резком уменьшении минимального шага интегрирования вид переходного процесса внешне не изменился, то сообщение о точности можно проигнорировать, так как при 0.001 заданная точность не обеспечивалась только на первом шаге моделирования, т. е. при отработке ступенчатого воздействия
Моделирование переходных процессов.
Рисунок 10
Слайд 17
Промышленные системы управления и регулирования
Основные принципы управления (регулирования)
Промежуточное тестирование
Слайд 18
Сформулируйте понятие регулирования.
Сформулируйте понятие управления.
В чем заключается смысл управления?
Приведите примеры управляющих воздействий.
Что называют автоматическим управлением?
Назовите основные типы задач оптимального управления.
Сформулируйте понятие системы автоматического управления (САУ).
В чем отличие автоматизированной системы управления от автоматической?
С какими видами автоматических систем вы познакомились?
Охарактеризуйте алгоритм работы системы автоматического управления.
В чем суть принципа регулирования по отклонению?
В чем суть принципа регулирования по компенсации?
Слайд 19
Какие задачи решают программная и следящая системы?
Какие задачи решает стабилизирующая система?
Что такое обратная связь?
В чем особенность работы ЭВМ в АСУТП?
Что такое канал связи?
Охарактеризуйте систему автоматического регулирования (САР).
Перечислите типы автоматических систем.
Как называется система, в которой возникают затухающие колебания?
Какую роль выполняет оператор в системе автоматического управления?
Какую роль выполняет оператор в системе автоматизированного управления?
Что называют звеном в системе автоматического регулирования?
Где располагаются датчики и исполнительные механизмы АСУТП?
Похожие презентации
 Формирование основных образовательных программ на основе ФГОС СПО
Формирование основных образовательных программ на основе ФГОС СПО
 Разработка основных профессиональных образовательных программ
Разработка основных профессиональных образовательных программ
 Основные понятия статики
Основные понятия статики
 Методы и средства управления рисками при таможенном контроле товаров и транспортных средств
Методы и средства управления рисками при таможенном контроле товаров и транспортных средств
 Правовое регулирование занятости и трудоустройства населения
Правовое регулирование занятости и трудоустройства населения
Поделиться ссылкой на презентацию через:
Код для вставки видеоплеера презентации на свой сайт: